PID là gì? Làm cách gì để điều chỉnh các thông số PID? Nguồn gốc ra đời của PID? Mục đích sử dụng là gì?,… Và rất nhiều các thông tin hữu dụng liên quan đến PID sẽ được chúng tôi chia sẽ ngay trong bài viết này? Mời quý bạn đọc dành ra chút thời gian để tìm hiểu dưới đây!
Bộ điều khiển PID là gì?
PID là gì?
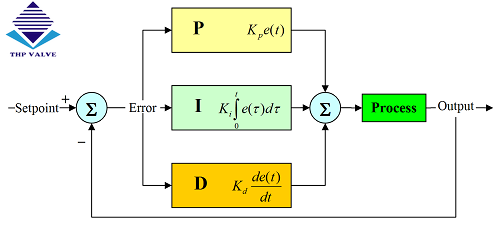
PID là tên viết tắt của Proportional Integral Derivative. Đây là một cơ chế phản hồi vòng điều khiển đã và đang được dùng phổ biến trong các hệ thống điều khiển công nghiệp. Bộ điều khiển này đã dùng dùng nhiều nhất trong các hệ thống vòng điều khiển kín (có tín hiệu phản hồi).
Bộ điều khiển này có thể tính toán được giá trị sai số sẽ là hiệu số giữa giá trị đặt mong muốn và giá trị của thông số biến đổi. PID có thể làm giảm tối đa tình trạng sai số bằng cách điều chỉnh các giá trị điều khiển ngay từ đầu vào.
Và để đạt được một kết quả tốt nhất, các thông số từ bộ điều khiển PID dùng trong tính toán cần phải điều chỉnh dựa vào tính chất của hệ thống. Đồng thời, nó cũng phụ thuộc vào những đặc thù của hệ thống.
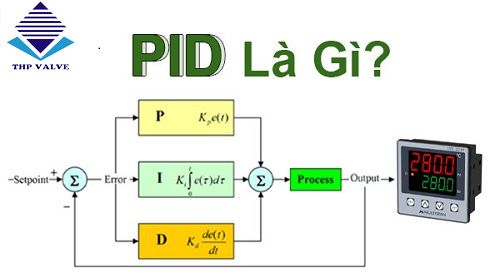
Trong đó:
P – Proportional: Đây là phương pháp dùng để điều chỉnh tỉ lệ và tạo ra các tín hiệu điều chỉnh tỷ lệ với phần sai lệch đầu vào dựa vào thời gian để lấy mẫu.
I – Integral: Đây là tích phân của sai số dựa vào thời gian lấy mẫu. Nó cũng là một phương pháp dùng để điều chỉnh nhằm tạo ra tín hiệu điều chỉnh sao cho độ sai lệch sẽ giảm tới 0. Từ đó, chúng ta cũng biết chính xác được tổng sai số tức thời theo thời gian hoặc các sai số tích lũy ở quá khứ. Khi mà thời gian càng ngắn thì việc điều chỉnh tích phân sẽ càng mạnh. Tương tương với đó chính là độ lệch sẽ càng thấp.
D – Dervative: Đây là vi phân sai lệch. Nó cùng để tạo ra các tín hiệu điều chỉnh sao cho tốc độ và tỷ lệ thay đổi sai lệch đầu vào. Thời gian càng dài thì phạm vi để điều chỉnh vi phân sẽ càng lớn. Điều này cũng tương ứng với bộ điều chỉnh có thể đáp ứng tốt những thay đổi từ đầu vào càng nhanh chóng.
Nguồn gốc ra đời của PID
Bộ điều chỉnh PID này đã được ra đời vào năm 1890 trong những thiết kế từ bộ điều tốc. Sau đó nó đã được sử dụng và phát triển mạnh mẽ trên hệ thống tàu thủy tự động với tên gọi PID Controller. Khái niệm này đã được phát triển vào năm 1911 bởi Elmer Sperry.
Nhưng mãi đến năm 1922, mới có một cuốn sách về bộ điều điển PID chính thức được xuất bản bởi Nicolas Minorsky. Trong tác phẩm này đã mô tả khá chi tiết về khái niệm của bộ điều khiển này, cùng với rất nhiều các thông tin hữu ích về PID mà tới nay nó vẫn hữu dụng.
Nicolas Minorsky đã phát triển lý thuyết dựa vào sự quan sát đối với những hành vi của những người lái tàu thuyền trong thời trước khi ông công bố về lý thuyết về PID. Sau đó, bộ điều chỉnh đầu tiên đã dựa vào lý thuyết PID cũng được ra đời như là: Khí nén, thủy lực, cơ khó và những hệ thống điện được phát triển sau chiến tranh thế giới thứ 2.
Cách chỉnh thông số PID
Đầu tiên là chúng ta cần phải xác định một cách chính xác về việc điều chỉnh vòng điều khiển đó là thay đổi thông số điều khiển của chúng. Nó sẽ bao gồm: khuếch đại/ đặt lại, tỷ lệ/ tỷ lệ khuếch đại, tốc độ/ vi sai tới một mức giá trị nhất định để có thể đáp ứng tốt việc điều khiển của người dùng.
Để có thể điều chỉnh được bộ điều khiển PID không đơn giản. Ngay khi mà bạn đã có đến 3 thông số cũng không có nghĩa là điều chỉnh được luôn. Vì phương pháp điều chỉnh này thường sẽ rất phức tạp. Sau đây dongholuuluong sẽ tổng hợp một vài thay đổi theo những cách thông thường như:
- Tính ổn định: Sự biến động sẽ thường gia tăng thêm bởi vì nó vượt qua mức đặc biệt khi có độ trễ lớn. Để đạt được tính ổn định cao, các bạn cần phải đảm bảo cả quá trình không có sự dao động.
- Hành được tối ưu hóa: Để thực hiện được điều này thì mọi người nên thay đổi các điểm đặt của bộ điều khiển hay tiến trình. Cả 2 yêu cầu của phương pháp này sẽ đảm bảo được tính ổn định cũng như sự hiểu biết của mình. Nó phụ thuộc vào rất nhiều các tiêu chuẩn đặc biệt như: thời gian thành lập, thời gian khởi động. Các quy trình cần phải được tối ưu hóa việc tiêu tán các năng lượng.
Mục đích sử dụng PID là gì?
PID được biết đến là bộ điều khiển lý tưởng cho những hệ thống điều khiển quy trình một cách hiện đại. Nó được dùng hầu hết trong những công việc có liên quan đến quá trình tự động trong ngành công nghiệp hiên nay. Mặt khác, nó dễ dàng điều chỉnh được lưu lượng, lực áp suất, nhiệt độ,.. Cụ thể thì bộ điều chỉnh PID sẽ được dùng cho các mục đích đó là:
- Nhằm hạn chế tối đa độ dao động khi hoạt động.
- Giảm tối ưu những sai số được xác lập tới mức tối thiểu
- Hạn chế thời gian xác lập cũng như độ vọt lố.
Ứng dụng PID là gì?
Hiện nay, PID đã được dùng trong rất nhiều ngành công nghiệp khác nhau. Nó thường dùng để hạn chế tối đa rụng động, giảm sai số, giảm thời gian thiết lập cùng với độ vọt lố,…
- Dùng để điều khiển mực nước: Bộ điều khiển đã được tự động hóa nhờ vào các thiết bị điện tử như: van điều khiển, cảm biến,…
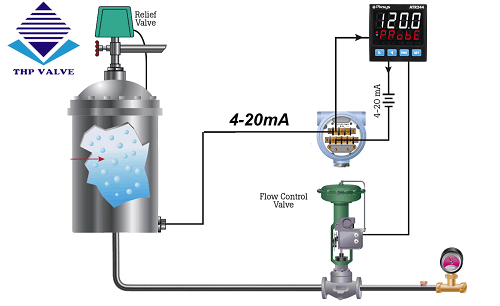
- Điều khiển biến tần: Các thiết bị điều khiển đã được tích hợp ngay ở đây sẽ bao gồm: cảm biến nhiệt độ, van điều khiển lưu lượng nước, điều khiển biến tấn,…
- Kiểm soát tốt các luồng không khí đi qua đường ống.
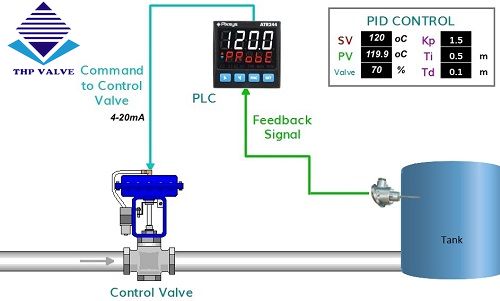
- Điều khiển PID trong PLC: Trong PLC thường sẽ có thêm chức năng đã được thiết kế sẵn dùng để điều chỉnh áp suất, nhiệt độ, lưu lượng dòng chảy,…
Mong rằng, qua bài viết này đã giúp bạn hiểu rõ hơn về khái niệm hàn lâm PID là gì? Với kinh nghiệm và sự nghiên cứu của chúng tôi đã tập hợp các nội dung chi tiết nhất để mọi người có thể nắm bắt được các thông tin liên quan đến PID.